I + D
Cheats del día
Team Speak 3
Cod2
Contador de visítas
No a los Cheats

Formulario de acceso




Motor paso a paso
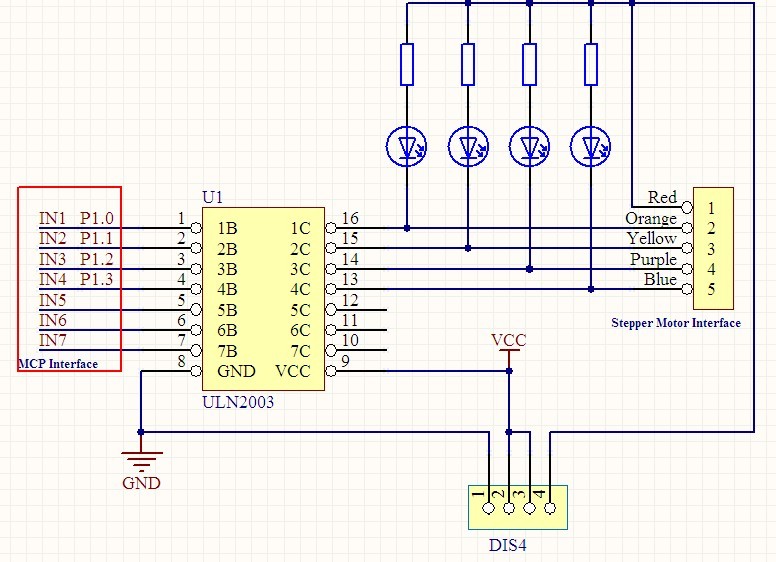
Código
//Function: This procedure is based on ARDUINO MEGA 2560 drive a stepper motor 28BYJ-48
//Time:August,17,2012
int IN1=1;
int IN2=2;
int IN3=3;
int IN4=4;
void setup()
{
int i;
for(i=1;i<5;i++)
pinMode(i,OUTPUT);
}
void loop()
{
byte phaseccw[8]={0x01,0x02,0x04,0x08,0x01,0x02,0x04,0x08};
byte speed = 5;
byte i,j,k,n,temp;
for(n=0;n<3;n++)//Forward to accelerate the rotation three times
{
for(k=0;k<255;k++)
{
for(i=0;i<8;i++)
{
temp = phaseccw[i];
for(j=1;j<5;j++)
{
//temp = phaseccw[i];
digitalWrite(j,temp&0x01);
temp>>=1;
}
delay(speed);
}
}
speed++;
}
for(j=1;j<5;j++)
digitalWrite(j,phaseccw[i]&0x00);
delay(1000);
for(n=0;n<3;n++)//Reverse deceleration rotation three times
{
for(k=0;k<255;k++)
{
for(i=0;i<8;i++)
{
temp = phaseccw[i];
for(j=1;j<5;j++)
{
digitalWrite(5-j,temp&0x01);
temp>>=1;
}
delay(speed);
}
}
speed--;
}
for(j=1;j<5;j++)
digitalWrite(j,phaseccw[i]&0x00);
delay(1000);
}