I + D
Cheats del día
Team Speak 3
Cod2
Contador de visítas
No a los Cheats

Formulario de acceso




Puente H para motores CC
En este tutorial les enseñaré como poder gobernar un motor de corriente continua y poderlo girar tanto a la izquierda como a la derecha, para ello utilizaremos un puente H. El funcionamiento del puente H no es más que hacer el cambio de polaridad del motor para así invertir su giro, también se puede utilizar para controlar su velocidad.
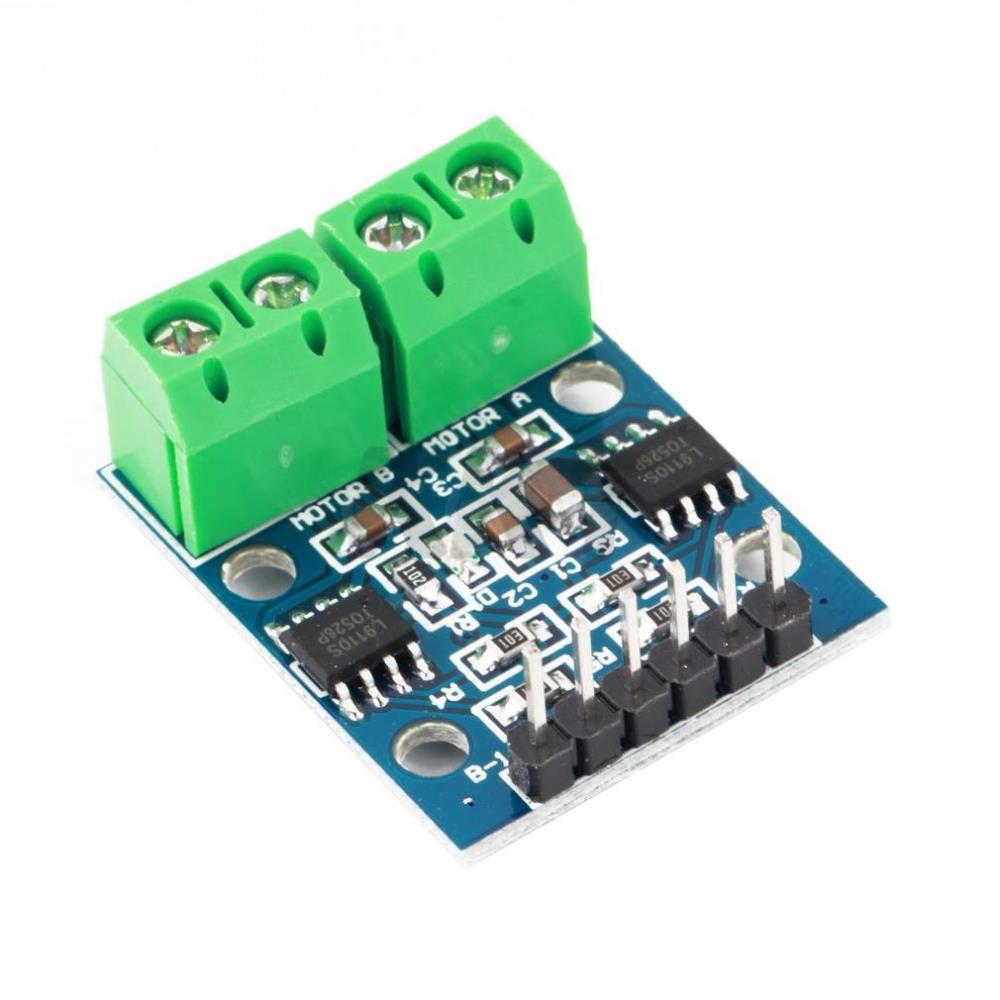
Este puente H consta de 2 borneros para el motor A y otro para el motor B y 6 pines de los cuales los dos centrales son positivo y negativo y se deben conectar a una fuente externa de corriente al arduino, ya que esta alimentación es la que suministra a los motores, los otros 4 son la trasmisión de datos que el arduino envía.
Código
/* Puente H
http://servercanary.sytes.net
ARDUINO (Puente H)
5 A-1A
6 A-1B
9 B-1A
10 B-1B
El motor 1 se conecta a los pines del Motor A del Puente H
El motor 2 se conecta a los pines del Motor B del Puente H
La fuente de alimentacion de los Motores se conecta, positivo al VCC y negativo al GND
*/
int izqA = 5;
int izqB = 6;
int derA = 9;
int derB = 10;
int vel = 255; // Velocidad de los motores (0-255)
void setup() {
pinMode(derA, OUTPUT);
pinMode(derB, OUTPUT);
pinMode(izqA, OUTPUT);
pinMode(izqB, OUTPUT);
}
void loop() {
analogWrite(derB, 0); // Detiene los Motores
analogWrite(izqB, 0);
delay (500);
analogWrite(derA, vel); // Frente 2 segundos
analogWrite(izqA, vel);
delay (2000);
analogWrite(derA, vel); // Derecha 0,5 segundos
analogWrite(izqA, 0);
delay (500);
analogWrite(derA, 0); // Izquierda 0,5 segundos
analogWrite(izqA, vel);
delay (500);
analogWrite(derA, 0); // Detiene los Motores
analogWrite(izqA, 0);
delay (500);
analogWrite(derB, vel); // Reversa 2 segundos
analogWrite(izqB, vel);
delay (2000);
}