I + D
Cheats del día
Team Speak 3
Cod2
Contador de visítas
No a los Cheats

Formulario de acceso




Simulador de vuelo con cualquier receptor rc y Arduino
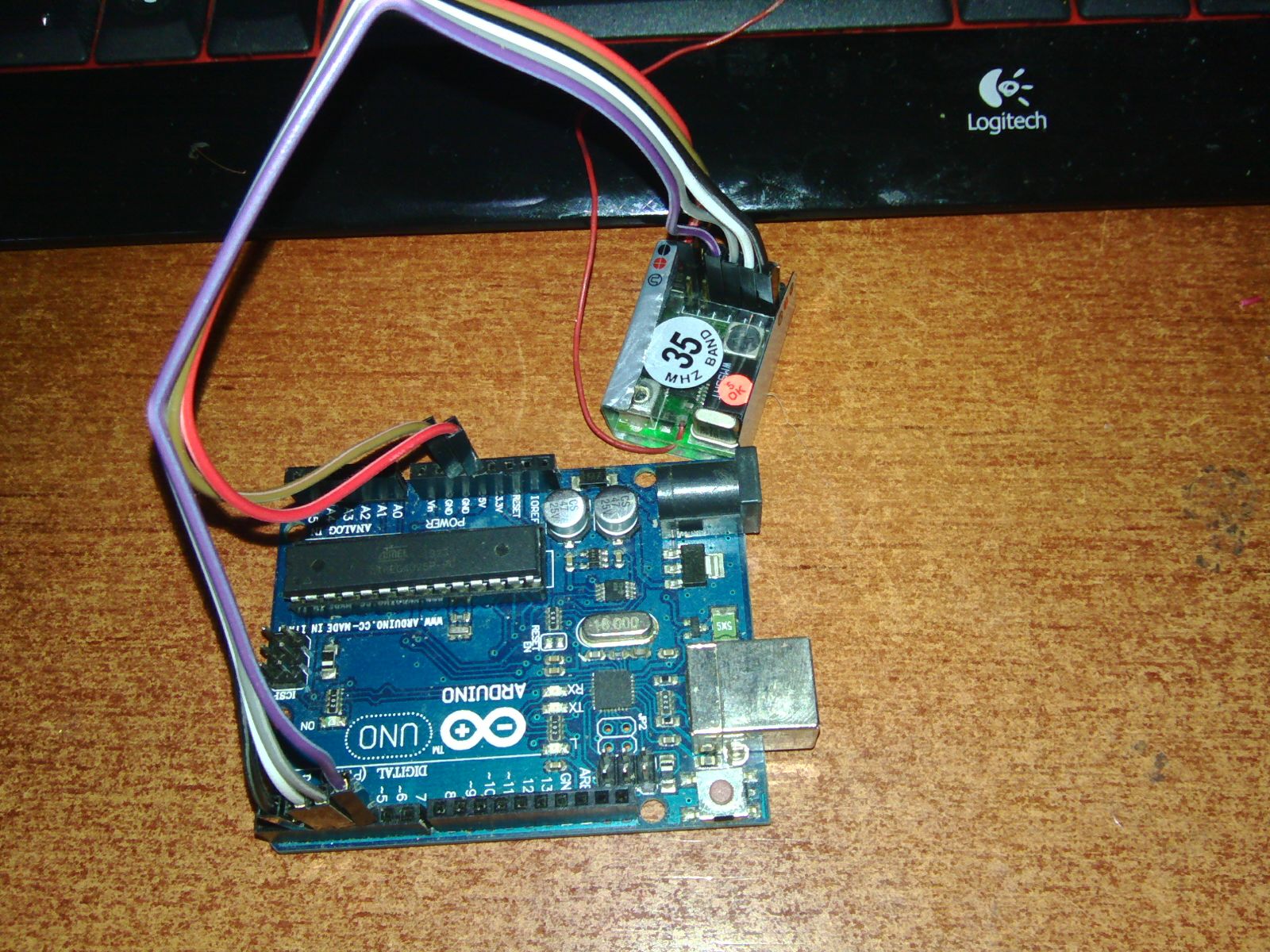
Buenas a todos, aquí les traigo un pequeño proyecto que viene muy bien para poder conectar cualquier receptor de radiocontrol a nuestro PC, sin necesidad de que nuestra emisora tenga la conexión correspondiente, solo tenemos que alimentar nuestro receptor con el arduino y asignar cada canal con el pin correspondiente.
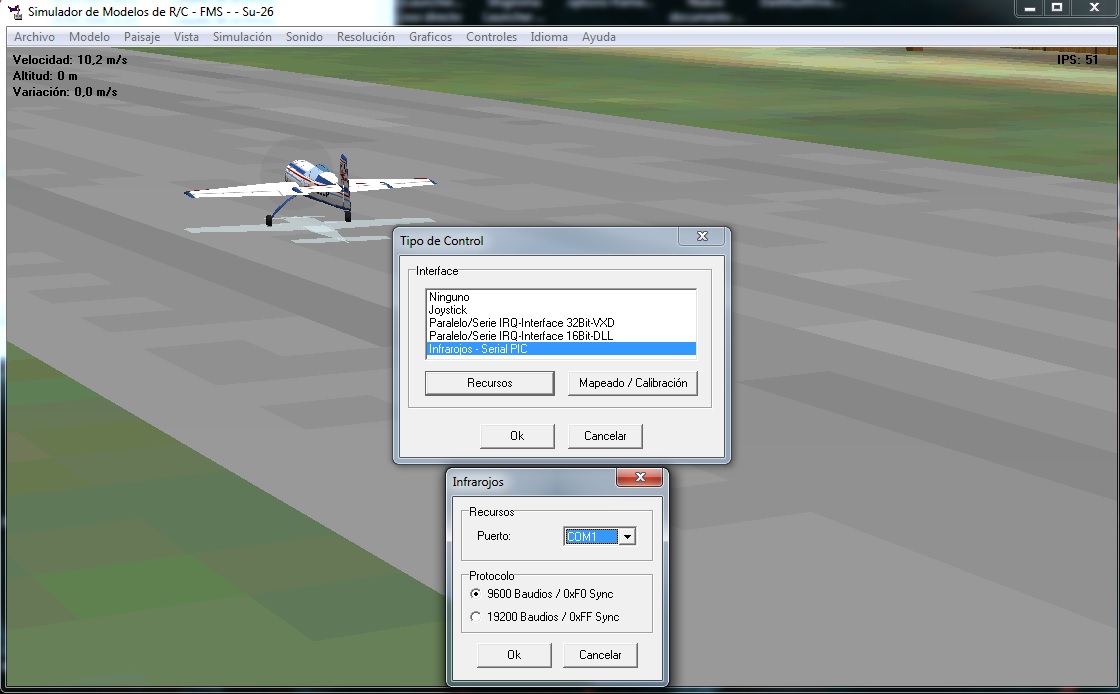
Para configurar el simulador de vuelo FMS vamos a controles, y seleccionamos Serial PIC, y le damos a recursos, ahÍ tendremos que poner el COM que tiene nuestro arduino, y de protocolo 9600 baudios.
Conexión Arduino
RX Chan 1 Arduino Pin2
RX Chan 2 Arduino Pin3
RX Chan 3 Arduino Pin4
RX Chan 4 Arduino Pin5
RX Chan BATT + Arduino 5V.
RX Chan BATT - Arduino Gnd
Código Arduino
#define RX_SIGNAL_TIMEOUT 15000 // 15mS
#define NUM_OF_RXCHANNELS 4
#define CHANNEL1_INPUT 2
#define CHANNEL2_INPUT 3
#define CHANNEL3_INPUT 4
#define CHANNEL4_INPUT 5
enum radio_states_e
{
POLLCHANNELS
,SENDDATA
};
enum radio_channels_e
{
CHANNEL1
,CHANNEL2
,CHANNEL3
,CHANNEL4
,DEFAULT_CH
};
enum radio_states_e enRadioStates;
enum radio_channels_e enRadioChannels;
unsigned long ulToggleTimer,ulPrevToggleTimer;
unsigned int uiPrevPinValue;
boolean blSignalTimeout;
byte bChannelData[NUM_OF_RXCHANNELS];
byte convertData(unsigned long ulElapsedTime)
{
ulElapsedTime = ulElapsedTime / 10;
if(ulElapsedTime > 250)
{
ulElapsedTime = 250;
}
else if(ulElapsedTime < 70)
{
ulElapsedTime = 70;
}
else
{
/* Do Nothing */
}
return (byte)ulElapsedTime;
}
void checkChannels()
{
unsigned int uiTemp;
switch(enRadioChannels)
{
case CHANNEL1:
{
// High to Low Transition of Channel 1
if((HIGH == uiPrevPinValue) && (LOW == digitalRead(CHANNEL1_INPUT)))
{
ulPrevToggleTimer = ulToggleTimer;
ulToggleTimer = micros(); // mark start of channel 2
#if 1
uiTemp = bChannelData[0] << 1;
uiTemp += bChannelData[0];
uiTemp += convertData(ulToggleTimer - ulPrevToggleTimer);
bChannelData[0] = (byte)(uiTemp >> 2);
#else
bChannelData[0] = convertData(ulToggleTimer - ulPrevToggleTimer);
#endif
enRadioChannels = CHANNEL3;
}
break;
}
case CHANNEL2:
{
// High to Low Transition of Channel 2
if((HIGH == uiPrevPinValue) && (LOW == digitalRead(CHANNEL2_INPUT)))
{
ulPrevToggleTimer = ulToggleTimer;
ulToggleTimer = micros(); // mark start of channel 3
#if 1
uiTemp = bChannelData[1] << 1;
uiTemp += bChannelData[1];
uiTemp += convertData(ulToggleTimer - ulPrevToggleTimer);
bChannelData[1] = (byte)(uiTemp >> 2);
#else
bChannelData[1] = convertData(ulToggleTimer - ulPrevToggleTimer);
#endif
enRadioChannels = CHANNEL4;
}
break;
}
case CHANNEL3:
{
// High to Low Transition of Channel 3
if((HIGH == uiPrevPinValue) && (LOW == digitalRead(CHANNEL3_INPUT)))
{
ulPrevToggleTimer = ulToggleTimer;
ulToggleTimer = micros(); // mark start of channel 4
#if 1
uiTemp = bChannelData[2] << 1;
uiTemp += bChannelData[2];
uiTemp += convertData(ulToggleTimer - ulPrevToggleTimer);
bChannelData[2] = (byte)(uiTemp >> 2);
#else
bChannelData[2] = convertData(ulToggleTimer - ulPrevToggleTimer);
#endif
enRadioChannels = CHANNEL2;
}
break;
}
case CHANNEL4:
{
// High to Low Transition of Channel 4
if((HIGH == uiPrevPinValue) && (LOW == digitalRead(CHANNEL4_INPUT)))
{
ulPrevToggleTimer = ulToggleTimer;
ulToggleTimer = micros();
#if 1
uiTemp = bChannelData[3] << 1;
uiTemp += bChannelData[3];
uiTemp += convertData(ulToggleTimer - ulPrevToggleTimer);
bChannelData[3] = (byte)(uiTemp >> 2);
#else
bChannelData[3] = convertData(ulToggleTimer - ulPrevToggleTimer);
#endif
uiPrevPinValue = LOW;
enRadioChannels = DEFAULT_CH;
blSignalTimeout = false;
enRadioStates = SENDDATA;
}
break;
}
default:
{
/* Do Nothing */
break;
}
}
}
void setup()
{
Serial.begin(9600);
ulToggleTimer = micros();
pinMode(CHANNEL1_INPUT,INPUT);
pinMode(CHANNEL2_INPUT,INPUT);
pinMode(CHANNEL3_INPUT,INPUT);
pinMode(CHANNEL4_INPUT,INPUT);
enRadioStates = POLLCHANNELS;
enRadioChannels = DEFAULT_CH;
}
void loop()
{
byte bTemp;
switch(enRadioStates)
{
/* Poll Channels */
case POLLCHANNELS:
{
/* Check Channel 1 High to Low Transition */
if(blSignalTimeout)
{
/* Low to High Transition of Channel 1 */
if((LOW == uiPrevPinValue) && (HIGH == digitalRead(CHANNEL1_INPUT)))
{
ulToggleTimer = micros(); // mark start of channel 1
uiPrevPinValue = HIGH;
enRadioChannels = CHANNEL1; // poll Channel 1 first
}
checkChannels();
}
/* Wait for Timeout */
else if(false == digitalRead(CHANNEL1_INPUT))
{
if((micros() - ulToggleTimer) >= RX_SIGNAL_TIMEOUT)
{
blSignalTimeout = true;
uiPrevPinValue = LOW;
enRadioChannels = DEFAULT_CH;
}
}
else
{
ulToggleTimer = micros(); // mark timeout start
}
break;
}
/* Send Data */
case SENDDATA:
{
// 0xF0 + NUM_OF_RXCHANNELS
Serial.write(0xF0+NUM_OF_RXCHANNELS);
// 0x00
Serial.write((byte)0x00);
// 100 = 1mS, 200 = 2mS.
for(bTemp = 0; bTemp < NUM_OF_RXCHANNELS; bTemp++)
{
Serial.write(bChannelData[bTemp]);
}
enRadioStates = POLLCHANNELS;
ulToggleTimer = micros(); // mark timeout start
break;
}
default:
{
/* error state, must not be reached */
break;
}
}
}