Usted está aquí: Inicio
I + D
Cheats del día
Team Speak 3
Cod2
Contador de visítas
4036840
Hoy
Ayer
Esta semana
Semana pasada
Este mes
Mes pasado
En total
50
239
366
4035283
50
7184
4036840
Tu IP: 216.73.217.21
Server Time: 2026-05-01 08:14:12
No a los Cheats

Formulario de acceso




Noticias
Escritorio remoto Raspberry Pi
Vamos a ver un tutorial muy sencillo de como hacer un escritorio remoto desde Windows para poder ver la Raspberry Pi. Así nos permitirá navegar por la Raspberry sin tener que utilizar el terminal con el ssh. Instalamos el servidor de escritorio remoto en la raspberry tecleando sudo apt-get install xrdp y le damos a yes. Ahora simplemente en windows iniciamos la aplicación por defecto de Windows "conexión a escritorio remoto" .

Iniciamos la aplicación y ponemos la IP de la raspberry.

A continuación nos pide usuario y contraseña. El usuario es pi y la contraseña la vuestra. Por defecto la contraseña es "raspberry". Ahora ya estamos conectados a nuestra raspberry pi y podemos ver su escritorio desde nuestro PC.

Instalar drivers wifi Intel corporation PRO/wireless 4965 debian jessie
{jcomments on}Lo primero que tenemos que hacer es saber cual es nuestro modelo de adaptador wifi, para ello utilizamos el siguiente comando en consola.
lspci
una ves sabido cual es nuestro modelo de wifi, que en este caso es una Intel corporation PRO/wireless 4965
Añadimos los repositorios non-free en /etc/apt/sources.list
deb http://http.debian.net/debian/ jessie main contrib non-free
Ahora actualizamos e instalamos el firmware iwlwifi
apt-get update && apt-get install firmware-iwlwifi
cargamos el modulo
modprobe -r iwl3945 iwl4965
modprobe iwl3945 ; modprobe iwl4965
solo queda ir al gestor de red wicd, preferencias y en interfaz inalambrica poner wlan0, aceptamos y le damos a actualizar
Sensor IR + arduino para encender un led con un mando a distancia.
{jcomments on}
En este post encenderemos y apagaremos 2 led mediante el mando de una tv o cualquier otro, los materiales que necesitamos son:
Arduino uno
Sensor IR (reciclado de un tdt roto)
3 led y 3 resistencias
Mando de tv
Librería para arduino (Descargar aquí)
Esquema Eléctrico

conectamos la pata central del sensor a negativo, la pata derecha a positivo +5V, y la pata izquierda al pin numero 11 de arduino.
A la pata izquierda del IR añadiremos el negativo de un led con resistencia, y el positivo del led a +5v (con este led veremos cuando el sensor está recibiendo datos del mando)
conectamos 2 led cada una con sus respectivas resistencias uno al pin 12 y el otro al pin 13.
una vez terminado el circuito, conectamos nuestro arduino al usb y lo ponemos en monitor serie, pulsamos una tecla del mando y nos dará un código, ese es el numero hexadecimal de tu botón el cual tendrás que modificar en el código de arduino.

Código
#include <IRLib.h>
int RECV_PIN = 11;
IRrecv My_Receiver(RECV_PIN);
IRdecode My_Decoder;
unsigned int Buffer[RAWBUF];
void setup()
{
Serial.begin(9600);
//delay(2000);while(!Serial);//delay for Leonardo
My_Receiver.enableIRIn();
My_Decoder.UseExtnBuf(Buffer);
pinMode(13,OUTPUT);
pinMode(12,OUTPUT);
}
void loop() {
if (My_Receiver.GetResults(&My_Decoder)) {
My_Receiver.resume();
My_Decoder.decode();
My_Decoder.DumpResults();
Serial.println(My_Decoder.value,HEX);
if(My_Decoder.value==0xFFA25D)
{
digitalWrite(13,HIGH); }
if(My_Decoder.value==0xFF22DD)
{
digitalWrite(13,LOW);
}
if(My_Decoder.value==0xFFE21D)
{
digitalWrite(12,HIGH);
}
if(My_Decoder.value==0xFFC23D)
{
digitalWrite(12,LOW);
}
}
}
Puente H para motores CC
En este tutorial les enseñaré como poder gobernar un motor de corriente continua y poderlo girar tanto a la izquierda como a la derecha, para ello utilizaremos un puente H. El funcionamiento del puente H no es más que hacer el cambio de polaridad del motor para así invertir su giro, también se puede utilizar para controlar su velocidad.
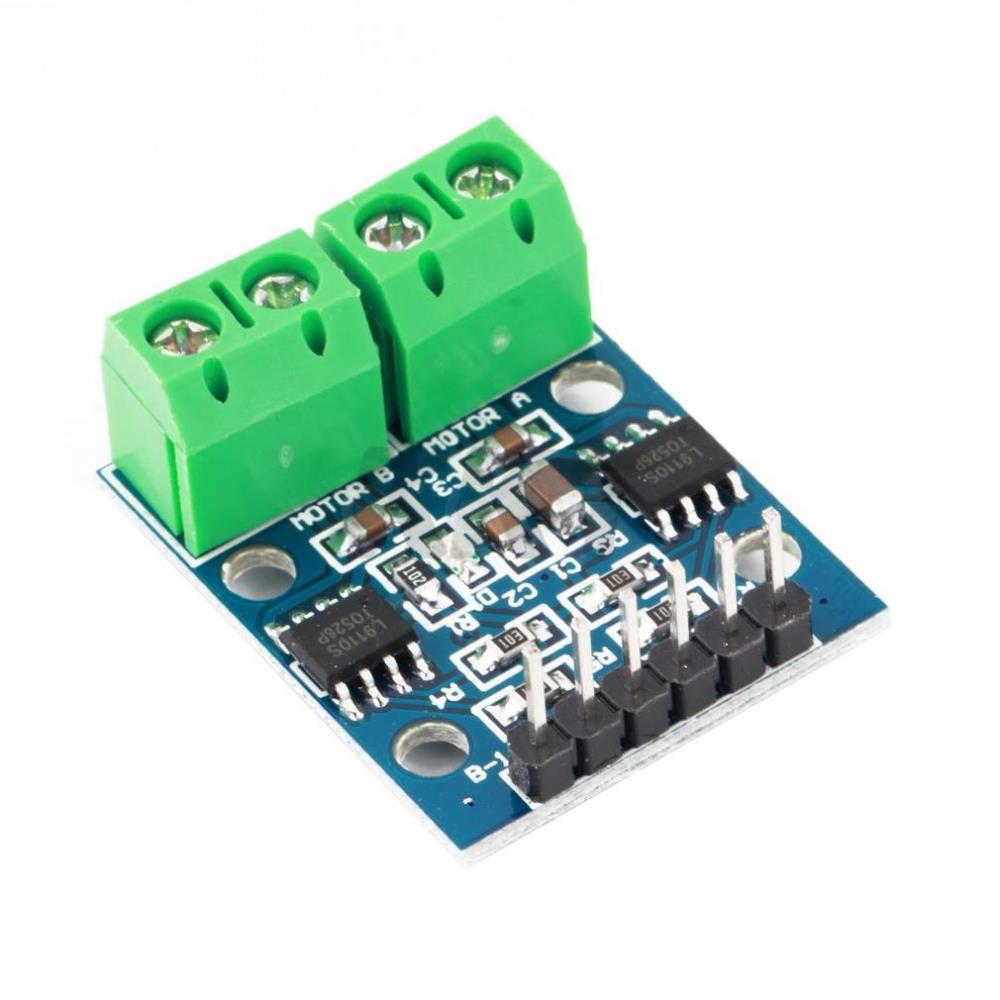
Este puente H consta de 2 borneros para el motor A y otro para el motor B y 6 pines de los cuales los dos centrales son positivo y negativo y se deben conectar a una fuente externa de corriente al arduino, ya que esta alimentación es la que suministra a los motores, los otros 4 son la trasmisión de datos que el arduino envía.
Código
/* Puente H
http://servercanary.sytes.net
ARDUINO (Puente H)
5 A-1A
6 A-1B
9 B-1A
10 B-1B
El motor 1 se conecta a los pines del Motor A del Puente H
El motor 2 se conecta a los pines del Motor B del Puente H
La fuente de alimentacion de los Motores se conecta, positivo al VCC y negativo al GND
*/
int izqA = 5;
int izqB = 6;
int derA = 9;
int derB = 10;
int vel = 255; // Velocidad de los motores (0-255)
void setup() {
pinMode(derA, OUTPUT);
pinMode(derB, OUTPUT);
pinMode(izqA, OUTPUT);
pinMode(izqB, OUTPUT);
}
void loop() {
analogWrite(derB, 0); // Detiene los Motores
analogWrite(izqB, 0);
delay (500);
analogWrite(derA, vel); // Frente 2 segundos
analogWrite(izqA, vel);
delay (2000);
analogWrite(derA, vel); // Derecha 0,5 segundos
analogWrite(izqA, 0);
delay (500);
analogWrite(derA, 0); // Izquierda 0,5 segundos
analogWrite(izqA, vel);
delay (500);
analogWrite(derA, 0); // Detiene los Motores
analogWrite(izqA, 0);
delay (500);
analogWrite(derB, vel); // Reversa 2 segundos
analogWrite(izqB, vel);
delay (2000);
}